在自动驾驶这条路上,有两派人一直吵得不可开交。
一派人是以特斯拉和马斯克为代表的“纯视觉派”。他们的想法很简单:人开车靠的是两只眼睛,也没往身上装激光雷达,那车凭什么不能只靠摄像头?马斯克甚至说过一句很刺耳的话——“只有傻子才用激光雷达。”
另一派人则是“激光雷达派”。他们认为光靠摄像头不靠谱,得用激光雷达当主力,再配上摄像头打个辅助。激光雷达负责测距离、建三维模型,摄像头负责认颜色、看手势、读路标。两样东西凑一块,才叫稳当。

这两套方案,各有各的毛病。
纯视觉便宜,摄像头满地都是,而且能识别红绿灯颜色、交警手势,对场景的理解能力也强。但它有一个致命弱点——对距离的判断不太行,三维感知弱。晚上或者进隧道光线一暗,表现就大打折扣。
激光雷达方案正好反过来。三维感知强,黑天雨天都不怕,距离测得一清二楚。但它贵,而且认不了颜色,看不懂红灯绿灯,也看不懂手势。要是硬把激光雷达和摄像头凑一块,数据一多,又会出现“到底听谁的”这种决策打架的问题。

所以科学家们其实在两个方向上使劲。
第一个方向:让摄像头也能搞出三维感知,暗光下也能看得清。这样摄像头就没缺点了,激光雷达就可以扔了。
第二个方向:让激光雷达也能识别颜色和手势,价格再降一降。这样激光雷达就没缺点了,摄像头就可以退休了。
这两个方向,谁跑得快,谁就能把对方干掉。
而从最近国内激光雷达的进展来看,第二个方向可能要率先撞线了。

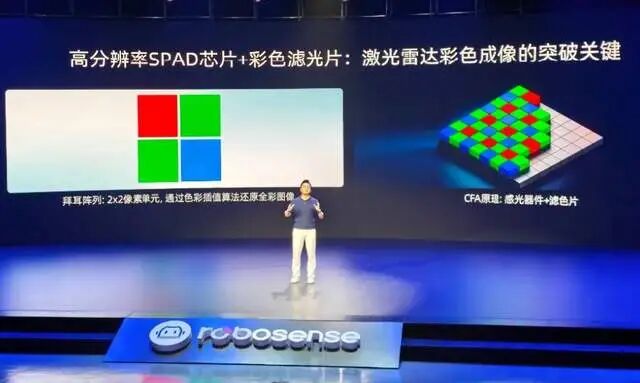
在速腾聚创2026年的技术开放日上,他们发布了两款实打实的芯片,不是PPT,是今年就能量产的。
第一款叫“凤凰”系列,是一颗全固态高分辨率SPAD-SoC。它的线数达到了2160线。你可能对这个数字没概念,简单说,它的细腻程度超过了400万像素的摄像头。什么意思?就是激光雷达打出来的点云密度,比普通摄像头拍的画面还细。
第二款叫“孔雀”芯片,集成了640×480的高密度SPAD阵列,达到了VGA级别的三维感知。

这两款已经够吓人了。但真正让纯视觉派睡不着觉的,是他们预告的2027年要发布的一款RGBD传感器。
什么叫RGBD?就是既能测距离(Depth),又能识别颜色(RGB)。说白了,就是让激光雷达长出“眼睛”,能分辨红绿灯了。
一旦激光雷达也能辨别颜色,那摄像头的优势还剩什么?只剩下便宜。可一旦这种RGBD传感器大规模量产,价格很快就会被打下来。到时候,激光雷达既能三维测距,又能看颜色手势,性能全面碾压纯视觉,价格又不贵——那纯视觉方案还有什么存在的意义?
所以,现在压力全到了马斯克那边。他当年嘲笑激光雷达是“傻子的选择”,可如今国产激光雷达已经能做到2160线、400万像素级别的细腻度,再过一年还能认颜色。纯视觉这条路,会不会反而成为第一个被时代抛弃的方案?
特斯拉怎么办?是继续头铁死撑,还是悄悄掉头?咱们走着瞧。
保宇配资提示:文章来自网络,不代表本站观点。